
When Dario Sosa, founder and CEO of Subsea Mechatronics (SSM), got in touch about an exciting, new project, we were keen to hear more. The biggest challenge as they embarked on a new innovation was a visibility near zero, making regular video footage useless for documentation. Luis Sanchez, CTO of Subsea Mechatronics, stated “Deploying human divers to carry out these inspections would not only yield poor results; it would be a health and safety hazard.” Needless to say, we did not require much convincing to participate in this intriguing project.
Competing to innovate Iberdrola’s processes for inspecting and cleaning the water supply pipes of their power plants
The project in question was actually a competition organized by Iberdrola, a major, Spanish energy company. In a time when energy is an increasingly important commodity, every single energy producer is looking to secure their production to ensure minimal disruption for their consumers - to provide stability in an otherwise volatile world.
In power plants, the production of energy generates a lot of heat. Heat that needs dissipating in order to keep the plant at an optimal temperature. The cooling system that is required to handle this job is both vast and extremely intricate. One basic hallmark of this type of power plant is that their cooling circuits use water that is recirculated from natural sources such as nearby rivers, seas and oceans.
For this cooling system to operate optimally, the flow rate of the water has to be maintained at a satisfactory level. Natural water in exposed pipelines, especially at the temperature this water holds, will stimulate organism growth and sedimentation build-ups, which affect the flow-rate of the water considerably.
The entire plant is shut down twice a year for maintenance purposes. The maintenance process involves various efforts to reduce sedimentation build up in the cooling system. These efforts are planned based on visual pipeline inspections, where the goal is to clean the pipeline in the most efficient way in the areas with the highest amounts of sedimentation.
Good reasons to replace divers with ROVs
Such visual inspections have historically been carried out by human divers. There are many reasons why divers are not the best solution for this job and why one should opt for a more mechanical solution:
Health and safety of the divers
The pipelines that comprise the cooling system are confined, tight spaces. The pipelines vary from 1-4m in diameter - often on the narrower end of this scale. Human divers put themselves in unnecessary danger by diving in these conditions.
The visibility in some cases, when chemical products are used to combat biofouling, is close to zero. The diver’s main task is to evaluate sedimentation build-up and plant growth to quantify flow restrictions. Having less than 10 cm visibility makes it difficult to quantify sedimentation build-up in any qualitative way.
Positioning/orientation
It is not sufficient to simply say that “Yes, foreign objects that impede flow rate exist in the pipeline”. One has to be able to accurately locate the area of the findings in order for the inspection data to be useful. Knowing exactly where an area of interest is makes it possible to not only intensify cleaning efforts on said area, but one can measure the area’s development over time to evaluate and optimize the chemical combatting and the cleaning efforts.
These are just some of the reasons why Iberdrola was looking for new, improved ways to carry out these tasks. And what better way to engage the many bright minds in the industry than to make it a competition?
The objectives of the Iberdrola competition
In short, the challenge at hand was “to find innovative solutions for inspecting and cleaning large water supply pipes in electricity power plants.”
More specifically, the objectives of the challenge were
“To be able to perform underwater inspections more efficiently while the system is operating, or at least maximize the availability of the system. For the inspections, the aim is:
1. To gain comprehensive information about the depth of deposits in specific areas along the pipeline
2. Estimate the amount of dirt adhered to the pipes
3. Know what type of dirt this is: tubularia, sludge, mussels, etc.”
The company who solved this challenge in the best way could be offered an opportunity to scale up the solution in collaboration with Iberdrola, adapting it by means of commercial agreement.
Customizing equipment that can navigate even the narrowest parts of the pipeline, provide accurate ‘stand-alone’ positioning, provide reliable visual documentation and clean the pipe
Being highly experienced in complex subsea research tasks, SSM made a clear plan for what kind of equipment was required in order to complete the challenge. This was no ordinary subsea research task, with lots of external factors rendering the use of conventional equipment ineffective. This called for a customized solution comprising cherry picked equipment such as the vehicle, the imaging technology as well as the positioning.
Vehicle
Due to the restricted space of the manhole, the total size of the vehicle was limited due to the need for the vehicle to enter the pipeline - which is 1 meter in diameter. This naturally put some limitations on how big the vehicle could be. In addition, it also put some limitations on what kind of tools could be utilized.
Imaging
Due to the near zero visibility caused by the vast amount of particles in the water, a regular underwater camera would not be suitable to visually document findings in an adequate way
Positioning
Tight, confined spaces paired with zero signal penetration/reception ruled out using any form of GPS or USBL positioning systems for the task.
A custom built SSM SOLEA-ROV paired with a Water Linked DVL A50 for positioning and an Imagenex sonar for visuals
In a time when every single KWh counts, Subsea Mechatronics not only had a business opportunity on their hands; they could also help improve the growing energy concerns becoming a crisis. The guys at SSM knew they had to get creative to fulfill this brief.
Vehicle
Given the small diameter of the pipeline entry in which the ROV, the vehicle used for this project had to be as small as possible. SSM’s fleet of vehicles ranges from industrial sized ROVs to miniature ROVs, all with different capabilities and features. The vehicle that was selected for this project is a custom built SSM SOLEA-ROV from the range of PIPEYE ROVs, complete with skid tracks for navigation in the pipeline.
Opting for a tracked, skid steered vehicle was a conscious choice. Due to the confined space of the pipeline, navigating a tracked vehicle and keeping it steady is much more convenient than operating a thruster controlled vehicle specially for the cleaning works. The sonar imagery is also much steadier when captured on a tracked vehicle.
Imaging
As previously mentioned, the visibility in these waters is as poor as you can imagine. With a bit of optimism, you could suggest that the visibility for this project was 10 cm. The 4K, high refresh rate camera SSM team uses for all their underwater video recordings was part of the payload, but the images it produced was underwhelming.
Since the images captured during the project would be used as a basis for optimizing the system’s maintenance procedures, the images needed to be accurate and consistent. The only way to achieve this given the turbidity of the water was by using a sonar. The sonar used in this case was an Imagenex 360 degree pipe profiling sonar.
Positioning
Since using traditional USBL paired with GPS positioning was out of the question due to the rebounds of the acoustic signals inside the pipe, the preferred option for accurate positioning was to use a Doppler Velocity Log (DVL).
However, not any DVL would be cut for the job. Having strict requirements for the size of the vehicle, there would naturally be limitations also in terms of what equipment spec could be used for the task.
It’s as if our DVL A50 was developed for this scenario specifically (it kind of was!):
Its world’s smallest size
The small physical size of the A50 makes it the most versatile DVL in terms of mounting capabilities. Depending on the vehicle, the DVL can be mounted at a negative offset from the frame of the ROV, making the A50’s incredibly short blanking distance even shorter.
Blanking distance
With the shortest blanking distance of any high performance DVL of only 5 cm, the lack of space in the pipeline did not cause any issues with achieving bottom lock and optimal positioning.
Long term accuracy
With a long-term accuracy of just ±0.1%, the A50 could be trusted to provide reliable, accurate and consistent positioning data.
Price point
The A50 is certainly affordable and yet this is achieved without compromising on quality or performance.
Topping the podium with the highest standards of quality and safety, replacing the traditional ways of pipeline inspection and cleaning
The objective of the project was, in short for this first phase, to gain comprehensive information about the depth of deposits in specific areas along the pipeline and identify what type of deposits these are.
Dario and his team at SSM had done a comprehensive job sourcing the best equipment for the job. Top tier equipment paired with outstanding ROV control capabilities yielded great results in their findings.
High quality images
The images captured by the sonar produced consistent and comparable images of the inside of the pipeline. Sedimentation build-ups can easily be assessed in the sonar footage, making it possible to determine what kind of fouling and sedimentation we are seeing along the pipe as well as its volume.
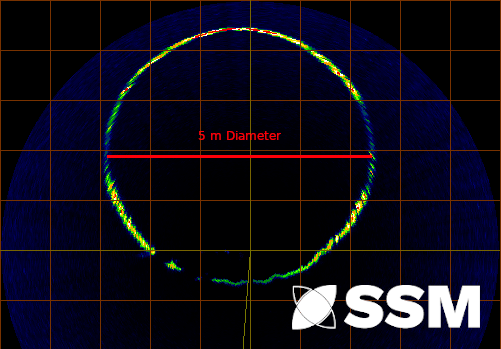
As you can see from the sonar image (recreated for illustrative purposes), SSM were able to deduct crucial information about the pipeline’s sedimentation build up. These images enabled the team to measure exact depth and amount of sedimentation build-up - as was asked in the brief.
Coupled with accurate position data
The location data gathered from the A50 DVL allowed for each sonar image to contain accurate location data. As part of the inspection, every part of the pipeline was mapped out using the DVL positioning data paired with the sonar images to produce a model of the pipe, allowing for highly accurate pinpointing of the vehicle’s position in the pipe.
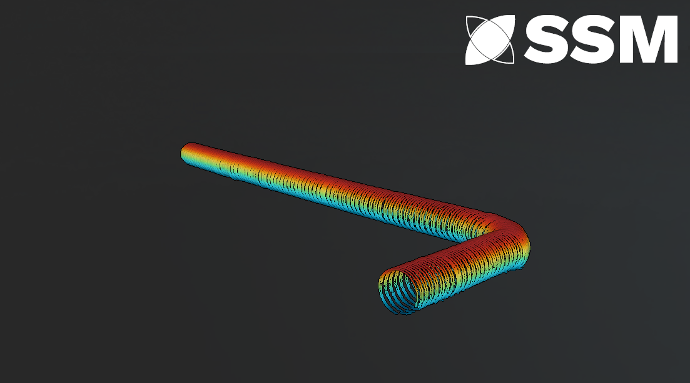
Using this positioning data, the images captured by the sonar were populated with accurate positioning information. As the challenge asked for, the sedimentation could be attributed to specific areas along the pipeline and measures of every cross-section along the inspected pipe were provided.
Secures the win for Subsea Mechatronics
These results were considered by Iberdrola to be so good that Subsea Mechatronics came out on top of the competition. This is Iberdrola’s own words about how Dario and his team solved the challenge:
“The company has developed an underwater ROV (Remotely Operated Vehicle) called PIPEYE that will allow Iberdrola's team to inspect and clean the large pipelines of our power plants, under the highest standards of quality and safety. This equipment replaces the traditional way of carrying out these operations, which to date have been carried out by divers, with the limitations that this entails. The use of PIPEYE will make it possible to inspect and clean a larger section of pipe, as well as to gather new data related to the state of the infrastructure and the amount of accumulated waste that must be extracted for the correct operation of the installation.”
We congratulate Subsea Mechatronics on this great achievement and are thankful for the opportunity to showcase the capabilities of our A50 DVL
Do you have an exciting project on which you would like to collaborate?
If you would like to get in touch with us about possible collaborations or you have a specific product need for a project, please get in touch with us. We are always keen to take part in innovative projects.
About Subsea Mechatronics
Subsea Mechatronics (SSM) is a mechatronics development and engineering company based in Las Palmas, Gran Canaria, that designs, manufactures, sells and operates remote sensing platforms such as ROVs. As their name implies, their expertise is focused on marine and extreme environments. They are one of just a handful of companies in the world specializing in exploration and research in flooded confined spaces; a niche yet important field of expertise. Head over to their website to learn more.