

















Underwater GPS G2 Standard Kit
The Underwater GPS G2 is one of the most robust acoustic positioning systems on the market today. It's a short baseline system that enables ROV and AUV operators to achieve accurate positioning in even the most challenging environments, such as shallow water, inside tanks or pools, or around installations.
With a huge number of customers all over the world in a wide range of applications, the system is very well proven and ready for mission critical assignments.
Contents in this kit
Quick and simple system set-up
No third-party sensors required
Efficiently navigate complex subsea terrains
Remain on course in murky, turbid environments
Reduce risk of vehicle damage
Follow your vehicles with absolute positioning
Features

Reliable positioning in challenging conditions

Easy to set up

Miniature locators

100m and 300m range versions available

Water Linked API for custom integration

Web-based GUI
Technical specifications
Mechanical
-
IP rating
IP67 (Topside)
-
Depth rating
200 m (U1 Locator)
-
Operating temperature
–10°C to 60°C
- Kit weight ~ 4-6 kg
-
Topside external dimensions
29.6 x 21.2 x 9.6 cm
Electrical / Interface
Acoustic / Performance
-
Range
100 or 300 meter radius (depending on version selected)
-
Ping rate
2-4 Hz
- Accuracy Horizontal range : < 0.2%
- Horizontal angle : < 1°
- Vertical (depth) : < 1%
-
Long term drift Locator A1: None
Locator U1: ~1 meter per 6 hours -
Transducer frequency
31.25 kHz to 250 kHz (200 kHz typical)
-
Transducer directivity
Omnidirectional, 360 degrees
-
Operating principle
Time of flight, Triangulation
- Integrated IMUs Yost Labs TSS-NANO URL
- TDK Invensense ICM-20948
-
Integrated GPS
u-blox NEO-M8T
Approvals
-
CE certificate
Yes - RoHS compliant Yes
Stay on course when it matters
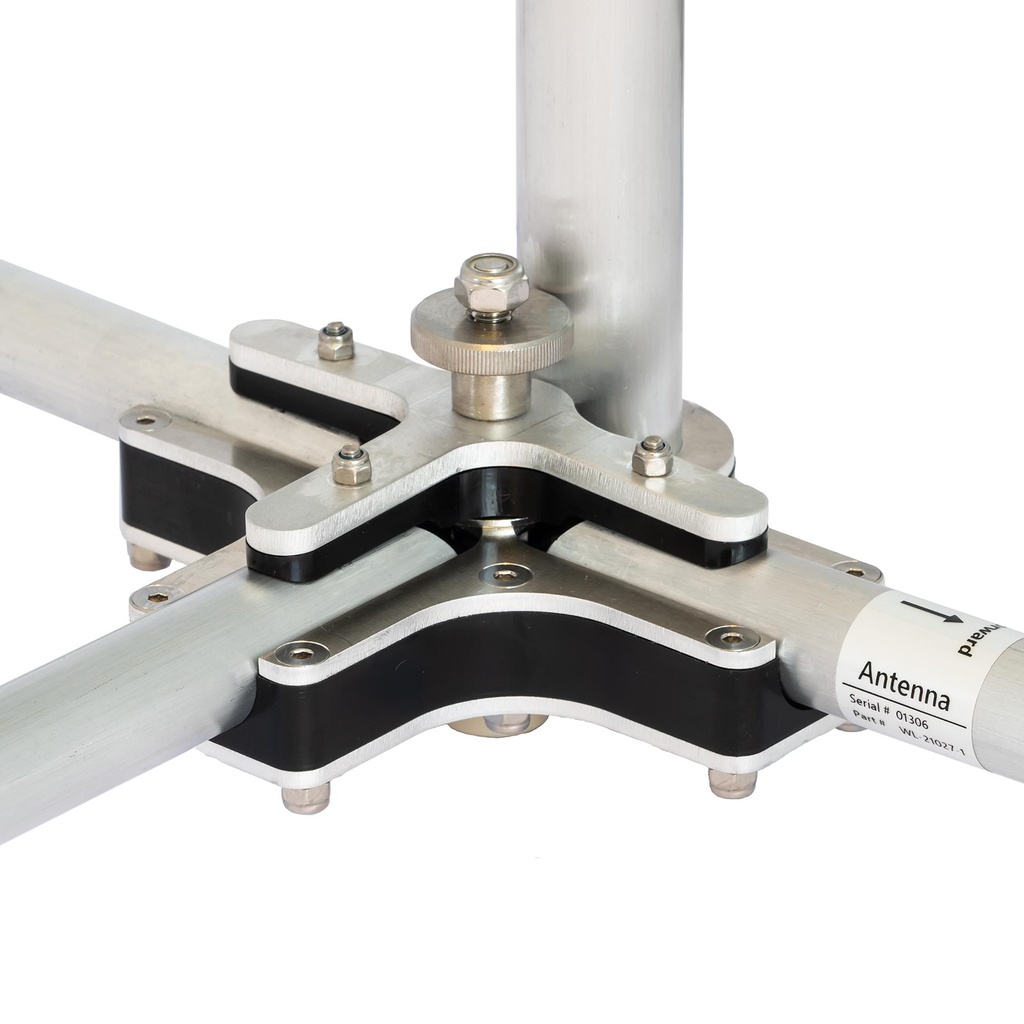
The UGPS system is a short baseline (SBL) solution that allows surface operators to precisely track their underwater vehicle or diver in real-time. With positioning accuracy within 100 to 300 meters, UGPS ensures that you remains on course even in complex or murky underwater environments. This is critical for operations where detailed location tracking and mapping are essential, such as pipeline inspections, seabed mapping, and structural surveys.
Water Linked’s Underwater GPS (UGPS) takes ROV navigation to the next level by providing absolute positioning in real-time. UGPS is especially beneficial in environments where traditional navigation tools struggle, such as shallow waters, near subsea installations, or inside confined spaces like tanks or harbors. This makes it a perfect solution for conducting search and recovery missions, inspecting underwater infrastructure, or performing environmental monitoring.
Follow the industry trend
As underwater vehicles become smaller and more accessible, the demand for affordable, lightweight sensors is skyrocketing. Stay ahead of the curve and make sure that you meet your customers' needs.
Integrating the UGPS with our mapping system allows us to dynamically transfer the mapping data onto the photogrammetry models. This way we can also much more accurately navigate the diver around these fragile pieces of history, from above the surface.
- Pawel Paniczko, founder Archcom, archaeological and commercial services
Downloads / Resources
Contact us for more information

"Hi there, are you not ready to commit yet or do you have an inquiry regarding your specific needs? Simply request a quote, and we'll send one over promptly. Alternatively, book a meeting to discuss your needs in detail."
- Scott
REQUEST A QUOTE BOOK A MEETING