Underwater GPS (UGPS)
Explore more of the subsea world with full confidence in the positioning data you receive with the Underwater GPS. With our purpose-developed positioning technology, unwanted noise no longer affects positioning accuracy the way it traditionally has with underwater positioning solutions. See the benefits and learn more about Underwater GPS.
See the product options Request a quote

Choose range spec
100 or 300 meter range. Select the version that suits your needs.

Quick deploy antenna
No need for separate receivers makes for a less resource demanding operation.

Full featured GUI
Access the Graphical User Interface through any standard web browser.
How it works:
Operating principle
You can choose between using a compact antenna or separate cabled receivers as your receiving baseline.
The antenna is quick and easy to set up while the separate receivers will enable very flexibly designed baselines. Both supports the full 300 meter range.
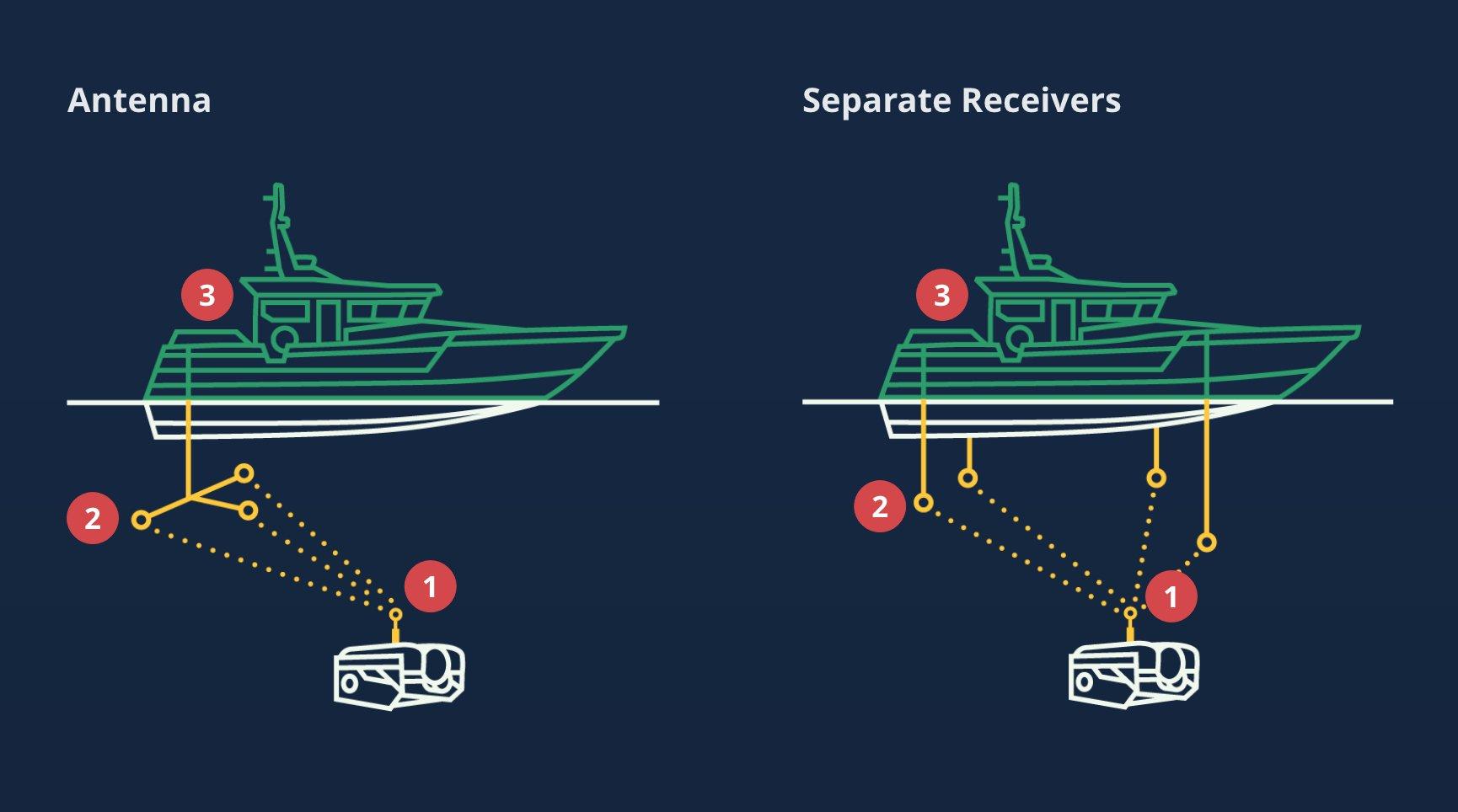
1. Locator
The Locator transmits an acoustic signal which are picked up by the Receivers.
2. Baseline
The antenna or separate Receivers picks up the acoustic signal from the Locator.
3. Topside
The topside positioning computer uses advanced algorithms to triangulate and calculate the position of the Locator based on the received signals from the antenna/receivers.
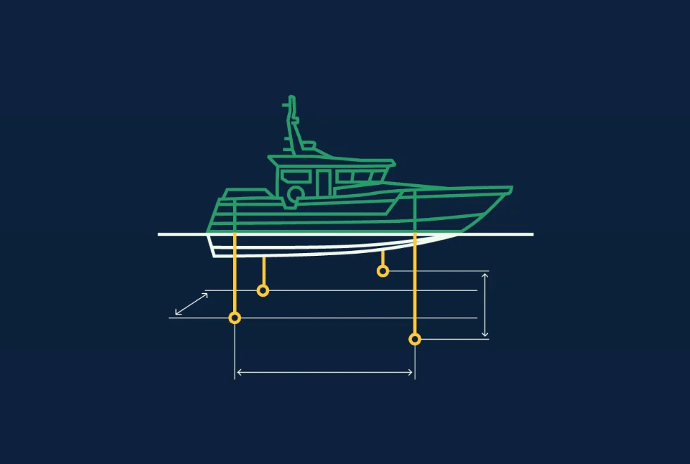
Range
See the range difference between the R100 and R300.
R100 or R300
The Water Linked Underwater GPS comes in two different range versions; R100 and R300 where the number indicates the maximum range in meters between the Locator and Antenna/Receivers.
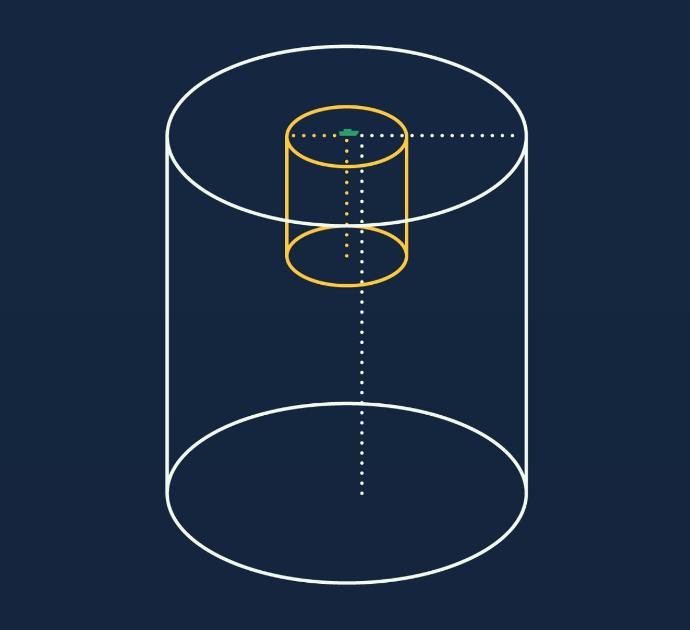
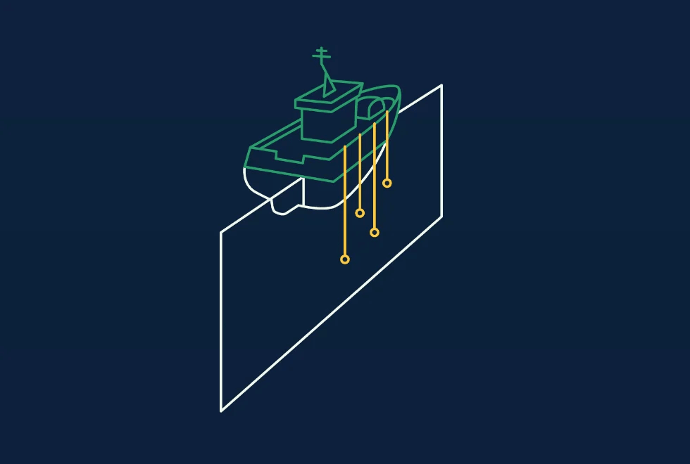
Cylindric Area
The operational area is designed as a cylinder with a radius of 100/300 meters and a depth of 100/300 meters.
Hard Limit
The 100/300 meter range is a “hard limit”, meaning that once the Locator moves outside that range, the position will not be calculated. The range is limited by the acoustic signal from the Locator and the software running on the Master-D1 positioning computer.
Limiting the search area
If you know you won’t need the full cylindric search area, it is beneficial to the performance of the system to apply some limits.

Limiting Range
You can reduce the radius of where the system will search for the locator. This is a great idea if you are operating in a confined space like water tanks, pools, fish cages or similar.
Reducing the range even in the open ocean may give you a better performance on short distances.
Limiting Area
You can limit which part of the cylinder you want to operate within. This should be done if there are obstacles like land or other no-go places for your ROV.
Reducing the area even in the open ocean may give you a better performance.
Limiting Depth?
It is not possible or needed to limit the depth. All Underwater GPS systems relies on a separate pressure sensor to provide the depth of the locator.
Full featured GUI
All Underwater GPS systems are supplied with a pre-loaded Graphical User Interface (GUI). The GUI runs on the Topside unit and is accessed through a standard web browser.
Features:
- Drag and drop functionality
- Map-view with absolute positioning
- Grid-view with relative positioning
- Live update
- Points of Interest
- Diagnostic tools
- OS independent (Windows/Mac/Linux)
Getting started
Underwater GPS is extremely easy to deploy and start to use!
Antenna Baseline solution
 1. Mount Locator
1. Mount Locator

2. Deploy antenna
3. GO!
Custom Baseline solution
The four receivers can be delivered with cable lengths of 10, 50 or 100 meter. This opens up for very flexible deployment options, even on the largest boats.
1. Mount Locator
2. Drop Baseline

3. Input Baseline in GUI
4. GO!
Optimal Receiver Setup
When possible, try to spread the Receivers out so you have at least 2 meters between them. Placing the receivers at different depths may increase performance.
Make sure the receivers are well submerged and preferably below the splash zone where there might be air bubbles from waves etc.
Limiting Receiver Setup
If you are unable to deploy a square baseline, you might end up with some limitiations.
In the example to the left, all receivers are on one line. With such a setup it is not possible to decide which side (A or B) of the baseline your locator is. You have to limit the search area in the GUI to only one of the sides.
Performance
The benefits of the UGPS are truly appreciated when working in the most challenging environments.
Combining the multiple receivers with extremely sophisticated software algorithms running on modern hardware, UGPS excels where traditional positioning systems stop working.
The amazing performance comes to display especially when the environment is challenging:
- Shallow water
- Inside tanks or pools
- Close to ship hulls
- Inside fully populated fish farming cages
-
Inside subsea templates
Accuracy
By utilizing a Short BaseLine (SBL) principle the UGPS is both stable and accurate, positioning the Locator to within 1 meter at 100 meter range
Performance Testing
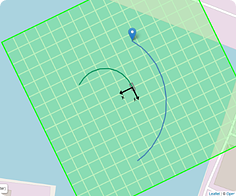
The video below shows a performance test of the UGPS which is mounted to a boat that is fitted with an RTK enabled GPS.
The RTK GPS provides ~1cm accuracy positioning of the boat and allows us to generate a tracklog for the boat as it navigates around the marina. We then have a tracklog for the GPS and for the UGPS.
By overlaying the GPS tracklog with the UGPS tracklog we demonstrate how reliable and accurate the UGPS is, despite the difficulties associated with acoustic positioning in shallow water (~6-8m depth).
Available Underwater GPS Products

Underwater GPS G2 Systems
Explore the default GPS G2 system as well as the ROV-specific systems.
Read more
Purchase in store
Underwater GPS Accessoriess
Browse the selection of upgrades and spare parts on our accessories page.
Read more
Would you like to discuss your underwater navigation needs with us?